Introduction
Induction machines, also called asynchronous machines, can be used as generators or motors. Induction machines can be either of one or three-phase construction. The following discussion focuses on the three-phase machines and their properties. The maximum of the applications for three-phase induction machines is with power ranges varying from a few kilowatts to a few hundred kilowatts with rated voltages below 1 kV. The range can be extended roughly up to 20 MW with rated voltages up to 15 kV. The simple, robust and low loss construction of an induction machine has contributed to its widespread success in different applications.


The stator has basically the same construction as with synchronous machines. It is fed by a three-phase alternating current providing rotating flux. This flux rotates at synchronous speed.
The rotor is a three-phase short-circuited winding. This winding can be a normal wound wind-ing or it can be done by casting aluminum “cage” windings into the slots in a laminated iron rotor construction. In the earlier case, it is referred to as “wound rotor machine,” and in the latter case, it is referred to as “squirrel cage rotor machine.”
The rotating stator field induces a flux in the rotor windings. Since the rotor windings are short-circuited, the induced flux will create a current in the rotor. This current will produce a flux of its own, opposing the flux that created it. As a result, there will develop a torque on the machine shaft. When the developed torque is higher than the resisting load torque, the machine starts to rotate as a motor.
During operation, under no-load conditions, the speed of the rotor is very close to the synchronous speed, thus the currents induced in the rotor will have a low frequency. The rotor currents will have a frequency corresponding to the rotating speed difference between stator field and rotor (shaft). This difference is referred to as slip. Normally, the slip is stated in relation to the synchronous speed i.e. relative slip (s).
When the slip is positive, the machine is working as a motor, and when it is negative, the machine is working as a generator. The slip is often given as a percentage value s%.
The name “induction machine” comes from the fact that the induced voltage in the rotor wind-ings is due to the rotating stator field, whereas the term “asynchronous machine” refers to the fact that the rotor is always rotating at a different speed than the stator field.
The performance of an induction machine can be studied based on a one-phase equivalent circuit.
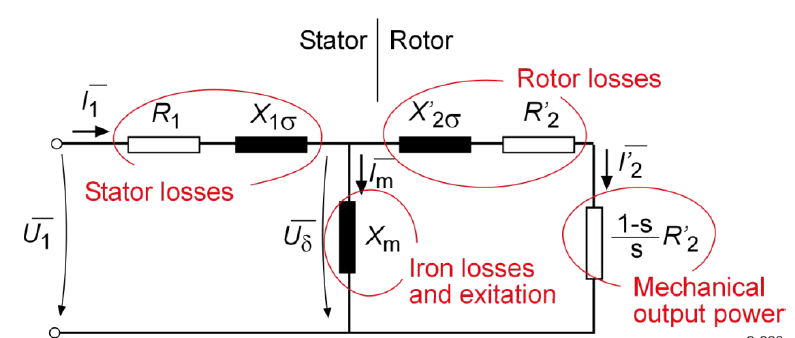
The reduced rotor current flowing through the slip-related rotor resistance component de-scribes actually the mechanical power developed at the rotor shaft at each operation point. Also, the rotor leakage reactance value is depending on the slip since the rotor current frequency is depending on the slip. Under light load conditions, the significance of the rotor leakage reactance is negligible, but the situation will change as the load, and slip increase.
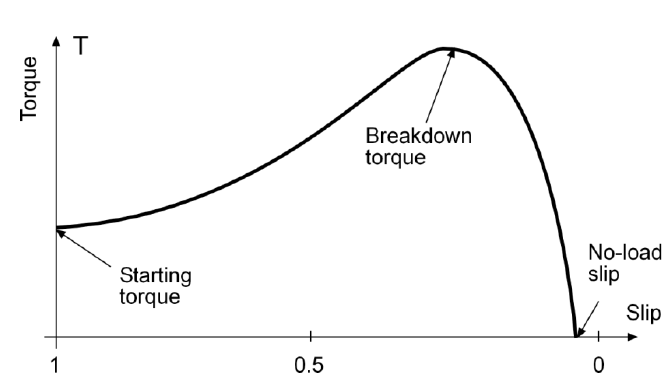
Torque-versus-slip characteristic of a three-phase induction motor
From the below figure, it can be seen that when the load torque requirement rises, the slip increases until a point of equilibrium is found. The torque can be increased until the breakdown torque point is reached, and sliding on the left-hand side of this point with a constant-load torque would mean stopping of the motor. It can be also noted that the starting torque is much less than the maximum, breakdown, torque. Also, the rated torque of the motor is below the maximum, at least by a relation of 1.6
Increasing the rotor resistance increases the starting torque, and this lowers the torque curve gradient between no-load and breakdown torque points. On the other hand, the rotor resistance does not affect the maximum, breakdown, torque value.
This phenomenon is utilized with induction motors having wound winding-type rotors with slip rings. External variable resistance is connected to the non-short-circuited rotor windings using the slip rings. By adjusting the external resistance, it is possible to increase the starting torque, lower the starting current, and within certain limits to control the motor speed. The drawbacks are the losses in the external resistor, limited speed adjustment range, speed variations with variable torque (load), and more complex structure of the motor.